温度調節器・指示調節計はPID 動作が普通です。
これをPI 動作で使用しても、P 動作単体で使用しても、コストに違いは有りません。
それならば、すべての制御に最も良い制御が得られる筈の、PID 制御を使用すればよいように思われます。
しかし、世の中のあらゆるものには、長所と欠点とが有ります。
長所だけで欠点無しというものは存在しません。
いつでも、PID 制御が優れているとは言えません。
目的や用途によっては、PID 動作よりも P 動作、PI 動作、PD 動作のほうが適している場合も有ります。
使い分けが必要です。
PID制御は、
制御対象の特性、
制御装置の特性、
使用方法、
制御パラメータに依存して、
大きく変わります。
制御対象と制御装置とが決まれば、それに対して最も優れた応答を示す、最適な制御パラメータ の値 (PID制御であれば比例幅X%、積分時間 Ti秒、微分時間 Td秒 )が存在します。
制御対象と制御装置に応じた、最適な制御パラメータの値を求め、その値に設定することがベストです。
では、どのような応答が最適なのでしょうか?
それぞれの制御対象によって、重要視するパラメータが異なります。
制御対象によって何を重要視するかも違ってきます。
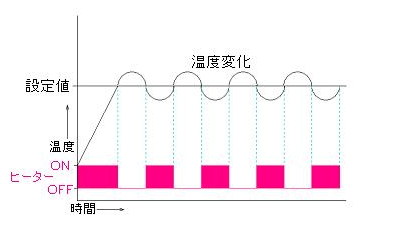
①目標到達時間の早さ
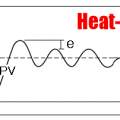
②オーバーシュート/アンダーシュートの抑え
③サイクリング(ハンチング)の安定性
④オフセットの修正時間
⑤外乱の修正時間の速さ
パラメーターは互いに関連して影響しあい、あちらを立てればこちらが立たない、という関係があります。
最適な応答はこれらの妥協になります。
したがって、高い汎用性を持った、初期設定は存在しません。
それぞれの制御対象ごとに設定する必要があります。
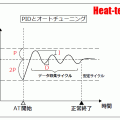
その為に、PIDオートチューニング機能があります。
PIDオートチューニングは、装置の加熱しやすさと放熱冷却による降温速度を初期段階でデータ取りします。 最も一般的なものは3サイクルの上下でデータ取りをして、パラメーターを決めます。
そのため、長時間運転すると、装置全体が温まり蓄熱されて、初期の加熱昇温時間と放熱降温時間からズレが発生します。 この現象を一般的には「温度ドリフト」と呼びます。
多くの現場では、温度ドリフトによるパラメーターのズレを回避する為、暖機運転後に再度PIDオートチューニングを実行して、パラメーターを取得しています。
さらに、機種によっては、一定の経過時間でPIDを再設定するものも有ります。
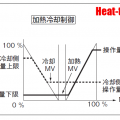
しかし、PIDオートチューニングは、「PIDを全て使う」という前提で設定されています。ほとんどの場合はそれで最適なパラメータが設定されますが、より高度な制御を求める方には、以下の特性を把握して使い分けて下さい。
●P動作(比例動作)単独では、応答性も悪くオフセットが生まれます。しかし、オフセットが生まれても構わない環境で、応答性の極めて高い装置では、DとIの無い単純な制御が良い場合が有ります。
●I 動作 (積分動作)は、単独でも制御能力があります。したがって、I 動作のみの制御が可能です。しかし、PI 動作と比べて、大幅に制御応答が悪くなります。オーバーシュートを避けたい制御に適しています。
●PI動作(比例積分動作)は、多少制御応答が悪くなりますが、オーバーシュートが出にくくなります。
また、大きな無駄時間がある場合にはD動作をハイゲインにすればするほど不安定になるので、D動作が無いほうが良い場合も有ります。
●D 動作(微分動作)は、制御応答の改善に使用されます。I 動作とは異なり、D 動作は、単独では制御能力がありません。P 動作と併用し、PD 動作として使用します。
●PD 動作(微分動作)は、目標値変化の場合、P 動作単独(微分時間 Td = 0) に比べて、制御応答が速くなります。
立ち上がりの目標温度到達が優先して、オーバーシュートしても構わないような制御に適しています。
PD動作では温度偏差を収束させることは出来ません。D動作を効かせすぎればハンチングの基になります。
■PID制御のコツ(PID制御のパラメータの決め方)
●P時間の増加
○オーバーシュートしないようになります。
×ゆっくりと立ち上がり整定時間が長くかかります。
×Pの値が大きすぎると、目標温度から離れた温度から比例動作が効きだすために、到達時間がかかることになり、オフセットも大きくなります。
●P時間の減少
○設定値の到達時間が短くなります。
×オーバーシュートが発生し易くなります。
×Pの値を小さくしすぎると今度はオンオフ動作に、近づいて、サイクリング現象(ハンチング)が発生してしまいます。
●I時間の増加
○ハンチングやオーバーシュート、アンダーシュートが小さくなります。
×設定値になるまでの時間が長くなります。
●I時間の減少
○早く立ち上がります。
×ゆるやかなハンチングが生じる場合や、オーバーシュート・アンダーシュートを繰り返して収束する場合が有ります。
×収束するまでに時間がかかります。
●D時間の増加
○目標温度へ昇温の際に温度上昇を抑制する働きもする為、行き過ぎも防ぐ効果があります。
×自分自身の変化に細かいハンチングを生じます。
●D時間の減少
○外乱の温度変化に対する応答性が良くなります。
×外乱時のオーバーアクションが大きくなり、設定値にもどるまで時間がかかります。