非接触高温加熱・ハイテクヒーターのヒートテック 熱風ヒーター:ハロゲンヒーター:遠赤外ヒーター
非接触高温加熱・ハイテクヒーターのヒートテック 熱風ヒーター:ハロゲンヒーター:遠赤外ヒーター


微分(PD)制御は、制御応答の改善に、使用されます。
積分制御とは異なり、微分制御は、単独では制御能力がありません。
比例制御と併用し、比例微分制御 として使用します。
微分制御は、誤差の単位時間当たりの変化率を用います。
測定値が設定値に素早く近づいている場合、設定値に滑らかに近づけるためにアクチュエータを早めに緩める必要があります。
逆に測定値が設定値から素早く離れている場合、その速さに比例して対処する必要があります。
カメラのオートフォーカスやサーボモータの回転角制御に使用されています。
微分制御は先を見越した制御をします。
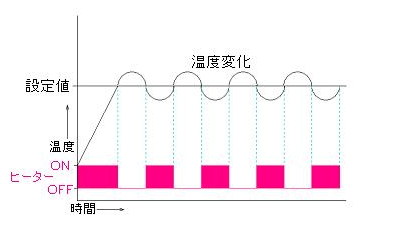
制御対象に遅れ要素がある場合は微分制御を使わないと常にオバーシュートします。
微分制御は変化が大きいと出力も大きくなります。
微分制御が効きすぎると、ハンチングが発生します。
また、オーバーシュートゼロモード設定などでは、温度が 設定値 に向かって素早く上昇しているとき、微分制御が効きすぎると 設定値に到達する前に一旦上昇が止まり、そこから再度上昇するというような動きをする場合が有ります。