非接触高温加熱・ハイテクヒーターのヒートテック 熱風ヒーター:ハロゲンヒーター:遠赤外ヒーター
非接触高温加熱・ハイテクヒーターのヒートテック 熱風ヒーター:ハロゲンヒーター:遠赤外ヒーター

このページの目次
- ■PIDの特長
- ■PIDの発展
- ●ジェームス・ワット(James Watt)
- ●ドプロニ(Gaspard Clair François Marie Riche de Prony)
- ●スロープ(Horatio Nelson Throop)
- ●ジェームズ・クラーク・マクスウェル(James Clerk Maxwell)
- ●エルマー・アンブローズ・スペリー・シニア(Elmer Ambrose Sperry)
- ●米国フォックスボロ社(Foxboro)
- ●マイノースキー(Nicolas Minorsky 1885-1970アメリカの数学者)
- ●米国フォックスボロ社(Foxboro)
- ●米国テイラー インストルメンツ社(Taylor instruments 現在は ABB社の一部)
■PIDの特長
オフセットも無くしたい、制御応答も速くしたい。この両方を満足させるには、PID 動作 を使用します。
PID制御の基本は、
1)現在の偏差に比例した修正量を出す比例動作(Proportional Action:P動作)と、
2)過去の偏差の累積値に比例した修正量を出す積分動作(Integral Action:I動作)と、
3)将来の予測値、偏差が増加しつつあるか減少しつつあるか、その傾向の大きさに比例した修正量を出す微分動作(Derivative Action:D動作)
PIDはこの3つを加算合成したものです。
これは「動特性」という立ち上りのときに発揮される特徴です。
さらに、PID制御は、目標値と実際値との間にズレが発生したとき、つまり偏差が発生したとき、
4)比例動作は偏差の変化に対して、直ちに応動するという「即応追従」動作をし、
5)積分動作は偏差がゼロになるまで、つまり目標値と実際値がピッタリ一致するまで制御出力を出し続けるという「継続追従」動作をし、
6)微分動作は偏差の変化率の大きさから将来の動きを予測し、これに対応する制御出力を出す「予見追従」動作をしています。
つまり、PID制御は、変化に対しては「即応追従」、「継続追従」および「予見追従」という動作を組合せて制御を実行していることにもなります。
これは「静特性」という安定状態で発揮される特徴です。
僅か3つの要素で、この「現在・過去・未来」と「即応・継続・予見」という6つの側面から、「動特性」と「静特性」という2つの状態での安定制御が出来るので、発明されてから尚百年経過しても多くの場所で使われています。
■PIDの発展
制御の発展")
●古代ローマでは、 水道搬送システムのサイフォンの為に水道管の空気を抜く必要がありました。
制御の発展")
石製のエア抜き弁が使用されていました。
満水時には栓をしないと、孔から漏水して崖崩れなどトラブルの原因になります。
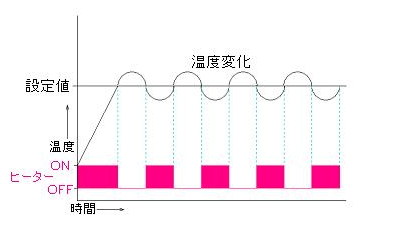
単純ですが、ONーOFF制御の起源です。
制御の発展")
エアー抜き弁の構造
A フロート
B エア溜まり
C 水
D 水道管
E 石を刳り貫いた弁箱
水道管の中に混入したエアは水位を下げ、フロートも下げるので、排気口を開き外部に放出される。
エアが少ないときは水位が上がりフロートも上昇して排気口を閉じる

●ジェームス・ワット(James Watt)
1736 – 1819スコットランドのエンジニア
1778年に蒸気機関の出力を表わす単位として「馬力」という単位も作りました。
蒸気機関制御のために、遠心振り子(flyball)による比例方式で弁の開度制御機構を開発しました。
制御の発展")
フライボール
制御の発展")
フライボールの構造

●ドプロニ(Gaspard Clair François Marie Riche de Prony)
1755-1839フランスの数学者・水力エンジニア

周波数解析のProny法の発案者でもあるドブロニが、1791年に積分制御方法を開発しました。
制御の発展")
●スロープ(Horatio Nelson Throop)
1807-1884アメリカの造船技師・船長
1857年に蒸気機関の制御のために比例微分制御を開発しました。

●ジェームズ・クラーク・マクスウェル(James Clerk Maxwell)
1831 – 1879スコットランドの理論物理学者「マックスウェルの悪魔」で有名
1868年制御動作の力学的研究を行い、安定制御の条件を解明した“On Governor”という論文を発表しました。

“On Governor”表紙

●エルマー・アンブローズ・スペリー・シニア(Elmer Ambrose Sperry)
1860-1930 アメリカの発明家・企業家
彼は「現代のナビゲーション技術の父」として知られていました。
制御の発展")
1911年に船の自動操舵の為に舶用ジャイロコンパスを使用したPID制御機を開発しました。
制御の発展")
●米国フォックスボロ社(Foxboro)
2014年よりシュナイダー・エレクトリック社
1912年に設定値を変更できるON-OFF制御器が開発されました。
制御の発展")
●マイノースキー(Nicolas Minorsky 1885-1970アメリカの数学者)
1922年にスペリーの考案した船の自動操舵用PIDを論文化しました。
制御の発展")
1922年にスペリーの考案した船の自動操舵用PIDを論文化しました。
制御の発展")
●米国フォックスボロ社(Foxboro)
2014年よりシュナイダー・エレクトリック社
1931年スタビローグStabilog Model 10 と命名された空気差動式PI調節器が作り出されました。
制御の発展")
●米国テイラー インストルメンツ社(Taylor instruments 現在は ABB社の一部)
●1936年「ダブルレスポンス プラス フルスコープ」と命名された空気式の可変型PI調節器が作り出されました。これは、PID調節器の原型ともいわれています。
制御の発展")
●1939年フルスコープ100と命名された記録機能付き可変型PID調節器が作り出されました。